Vývoj amerického navigačního systému NAVSTAR GPS (Navigation Signal Timing and Ranging Global Positioning System) započal v roce 1973 a navazoval na předchozí družicový navigační systém Transit provozovaný od roku 1964. První testovací satelit systému GPS byl vypuštěn na oběžnou dráhu v roce 1978. Plné operační dostupnosti bylo dosaženo v roce 1994. Plná operační dostupnost znamená v případě systému GPS osazení šesti oběžných drah 24 satelity. V současné době obíhá na orbitě 31 satelitů, z nichž je 30 v aktivním stavu a jeden ve stavu údržby. V devadesátých letech byl signál ze satelitů záměrně degradován použitím takzvané selektivní potupnosti (SA – Selective Availability), která zhoršovala možnost určení polohy pro neautorizované uživatele. Selektivní dostupnost byla odstraněna v roce 2000 z nařízení prezidenta USA.
Od začátku byl systém vyvíjen Ministerstvem obrany Spojených států amerických pro vojenské účely. Nyní GPS poskytuje služby určení polohy, navigace a určení času nejen pro vojenské účely, ale také pro civilní využití po celém světě. GPS v současnosti poskytuje dva druhy služeb:
-
SPS (Standard Positioning Service) dostupný pro standardní civilní použití. Tato služba je k dispozici pro běžné uživatele pomocí komerčně dostupných zařízení. Přesnost určení polohy je v řádech jednotek metrů.
-
PPS (Precision Positioning Service) dostupný pouze pro autorizované uživatele. Autorizovanými uživateli jsou především armády spojených států amerických a jejich spojenců. Přesnost určení polohy je zvýšena oproti SPS na hodnoty v řádech desítek centimetrů.
3.1 Kosmický segment GPS
V plné operační dostupnosti sestává vesmírný segment z minimálního počtu 24 satelitů. Tyto satelity obíhají Zemi ve výšce 20 200 km nad povrchem rychlostí 3,8 km/h s oběžnou dobou 11 hodin a 58 minut (polovina siderického dne). Satelity jsou rozmístěny v šesti oběžných drahách se sklonem 55 stupňů a se vzájemným posunem 60 stupňů. Rozmístění satelitů na oběžných drahách je asymetrické, tedy satelity jsou v různé vzdálenosti od sebe. Toto rozmístění zajišťuje větší odolnost proti chybám.
V roce 2011 byla dřívější konstelace satelitů upravena pro zlepšení pokrytí a do základní konstelace 24 satelitů byly přidány další tři satelity. Za základní konstelaci je nyní považováno 27 satelitů. V posledních letech se jejich počet pohybuje okolo 30 až 32 aktivních satelitů rozmístěných po pěti až šesti na každé oběžné dráze.
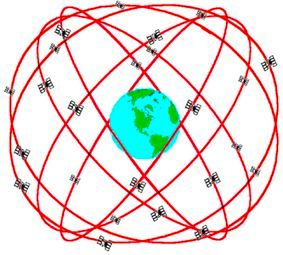
Satelity systému GPS
Minimální počet satelitů pro plnou operační dostupnost je odvozen z podmínky zajištění viditelnosti alespoň čtyř satelitů z každého místa na Zemi. Další přidané satelity zvyšují přesnost a to především v místech se špatným výhledem na oblohu, například v centech měst s vysokými budovami.
Každá družice váží přibližně 1,8 tuny a kromě solárních panelů a zdroje energie na palubě nese 3 až 4 velmi přesné atomové hodiny s rubidiovým oscilátorem, antény pro vysílání rádiových kódů, antény pro komunikaci s pozemními stanicemi a antény pro vzájemnou komunikaci družic. Dále družice nesou i optické, rentgenové a pulzní elektromagnetické senzory pro detekci startů balistických raket a jaderných výbuchů. Družice jsou během roku několikrát odstaveny řídicím segmentem za účelem údržby atomových hodin a korekce dráhy letu. Průměrná životnost družic systému GPS je přibližně 10 let.
3.2 Kontrolní a řídicí segment GPS
Kontrolní a řídicí segment se skládá z pozemních základen určených k monitorování, kontrole, řízení a udržování vesmírného segmentu. Centrem kontrolního segmentu je hlavní řídicí stanice umístěná na Schrieverově letecké základně amerických vzdušných sil (USAF) v Colorado Springs ve Spojených státech amerických. Hlavní řídicí stanice odpovídá za řízení všech kontrolních a řídicích procesů, přijímá a analyzuje informace ze satelitů (např. informace o stavu satelitů, vysílané navigační informace, a podobně) a navigační informace z 16 pozemních monitorovacích stanic. Kromě této hlavní stanice je v Kalifornii umístěna i záložní stanice pro případ výpadku hlavní řídicí stanice.
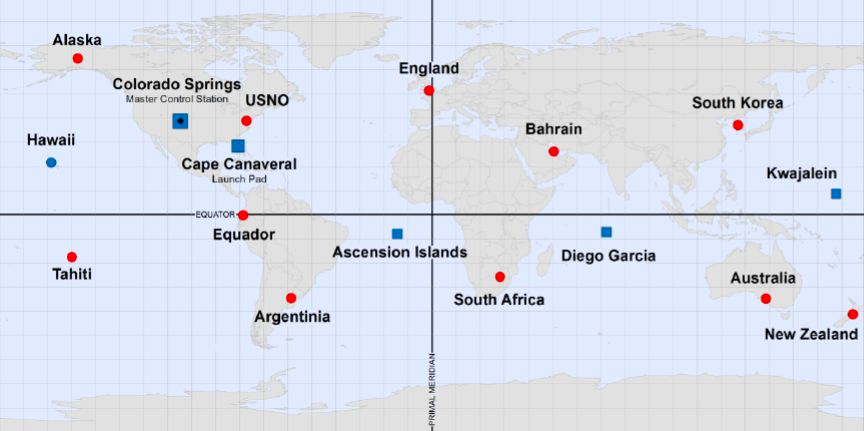
Monitorovací stanice systému GPS
Monitorovací stanice jsou rozmístěny po celé Zemi poblíž rovníku tak, aby byly schopny dohromady neustále přijímat signál od všech satelitů. Jejich účelem je monitorovat a kontrolovat přenášené navigační zprávy a polohy satelitů. Tyto údaje poté posílají hlavní řídicí stanici. Na základě nasbíraných informací posílá hlavní řídicí stanice příkazy a informace satelitům pro zajištění správných a spolehlivých služeb. Družice tak dostává informace o predikci vlastní dráhy (efemeridy), modelu ionosférické refrakce a přibližné poloze a stavu ostatních satelitů. Platnost těchto informací je řádově několik hodin.
V případě výpadku pozemního segmentu například v důsledku útoku přejdou družice do takzvaného režimu AUTONAV (Autonomous Navigation Mode), ve kterém jsou schopny pracovat až 6 měsíců. V tomto režimu komunikují družice mezi sebou a vzájemně si porovnávají stav svých hodin a efemeridy.
Řídicí stanice kromě posílání informací provádí také korekci atomových hodin družice a řídí manévry družic při pohybu na oběžné dráze.
3.3 Uživatelský segment GPS
Uživatelský segment je tvořen různými typy GPS přijímačů, které zpracovávají informace ze satelitů viditelných v danou chvíli nad obzorem. Systém GPS pracuje na principu pasivních GPS přijímačů – komunikace mezi vesmírným a uživatelským segmentem probíhá pouze jednosměrně ve směru od satelitu k GPS přijímači.
Na základě přijatých časových značek z jednotlivých družic a jejich polohy je možné vypočítat zeměpisnou výšku, šířku a nadmořskou výšku GPS přijímače. Kromě určování polohy je možné systém GPS použít také pro stanovení přesného času.

Přijímače GPS
Přijímače GPS je možné rozdělit podle přijímaných kanálů na jednokanálové a vícekanálové. Vícekanálové přijímače podporují paralelní zpracování signálů ze satelitů a určení polohy je tak díky jejich použití výrazně rychlejší než s jednokanálovými přístroji. Z pohledu přijímaných frekvencí je možné přijímače rozdělit na jedno frekvenční, dvou frekvenční a více frekvenční. Jednofrekvenční přijímače jsou zpravidla přijímače určené pro standardní civilní použití. Oproti tomu dvoufrekvenční přijímače dokážou přijímat jak civilní signál, tak kódovaný signál na jiné frekvenci. Vícefrekvenční přijímač umožňuje příjem informací na frekvenci v pásmu L5.
Protože systém GPS byl prvním globálním satelitním navigačním systémem v plné operační dostupnosti, je většina zařízení umožňujících satelitní navigaci vybavena právě přijímačem GPS. S postupným rozšiřováním a zprovozňováním ostatních satelitních systémů jsou zařízení vybavována kombinovanými přijímači schopnými detekovat signály více satelitních navigačních systémů.
3.4 Signály v GPS
Přenos informací od satelitů k uživatelským GPS přijímačům probíhá prostřednictvím signálů přenášených na frekvenci v pásmu L1 (1575,42 MHz) a L2 (1227,6 MHz). Novější družice využívají navíc pásmo L5 (1176,45 MHz). Všechny satelity využívají pro přenos informací stejné frekvence, k rozlišení informací jednotlivých satelitů mezi sebou je využito kódového multiplexu CDMA.
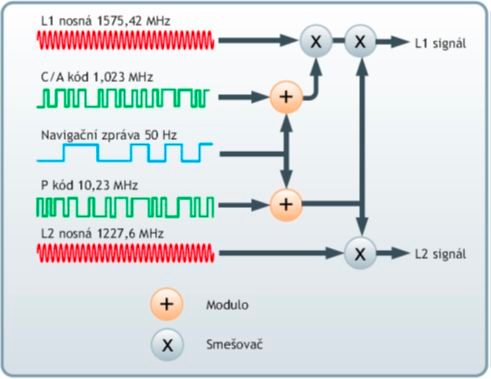
Signály a frekvence v GPS
Na frekvenci v pásmu L1 je modulován kód C/A (Coarse / Acquisition) dostupný pro civilní účely. C/A kód je 1023 bitů dlouhá pseudonáhodná posloupnost čísel, která je vysílána rychlostí 1,023 Mbit/s a opakuje se tak každou milisekundu. Čipová frekvence C/A kódu je 1,023 MHz. Každá družice systému GPS má vyhrazený vlastní kód, na základě kterého je možné ji identifikovat.
V satelitech GPS příští generace se pro neautorizované uživatele plánuje použití nového kódu C (Civilian) a kódů L1C na frekvenci v pásmu L1, kódu L2C na frekvenci v pásmu L2. Zároveň bude přidán signál L5 na frekvenci v pásmu L5 pro minimalizování chyby určení pozice pro komerční účely, služby spojené se záchranou životů (Safety-Of-Life) a pro interoperabilitu s ostatními systémy.
Kromě kódu C/A je na frekvenci v pásmu L1 přenášen i kód P (Precision) určený pro autorizované uživatele, kterými jsou armády spojených států a jejich spojenci. Pro zvýšení přesnosti je tento kód přenášen zároveň prostřednictvím frekvence v pásmu L2. To umožňuje částečné potlačení chyby vzniklé při průchodu signálu ionosférou.
P kód je stejně jako C/A kód pseudonáhodná sekvence s délkou přibližně 2,35·1014 bitů, která je rozdělena na 38 subsekvencí, ze kterých je 32 vyhrazeno pro použití družicemi. Délka sekvence pro jednu družici je 6,1871·1012 bitů. Tato délka kódu zajišťuje zvýšenou korelovatelnost a snížení pravděpodobnosti chyby. Rychlost přenosu P kódu je 10,23 Mbit/s (čipová frekvence P kódu 10,23 MHz) a kód se opakuje jednou za týden.
Kód P se dále asymetricky šifruje a označuje se jako P(Y).
GPS – navigační zpráva
Na oba kódy C/A a P(Y) je dále namodulována navigační zpráva. Tato zpráva obsahuje informace potřebné pro určení polohy – efemeridy, korekci hodin, informace o stavu družic a almanach obsahující celou konstelaci satelitů. Navigační zpráva je přenášena rychlostí 50 bitů/s. Celková délka zprávy je 37 500 bitů. Odvysílání celé zprávy trvá 12,5 minuty.
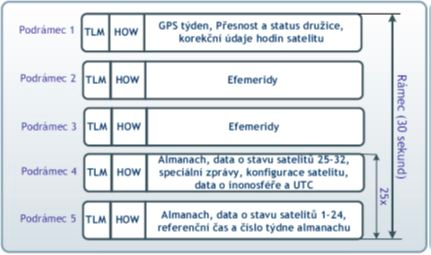
Navigační zpráva GPS
Navigační zpráva se dělí na 25 rámců a každý rámec se dělí na 5 podrámců. Tyto podrámce mají délku 300 bitů a obsahují:
- Podrámec – číslo týdne GPS, korekce pro atomové hodiny a stav družice
- Podrámec – první část efemerid dané družice
- Podrámec – druhá část efemerid dané družice
- Podrámec – almanach a stav družic 25 – 32, data pro ionosférický model
- Podrámec – almanach a stav družic 1 – 24
Z těchto podrámců se první tři opakují v každém rámci. Podrámce 4 a 5 nesou v každém rámci jen 1/25 dat. Každý podrámec se dále dělí na 10 slov každé o délce 30 bitů a dobou přenosu 0,6 sekund.
První slovo v každém podrámci se nazývá telemetrické slovo (TLM – Telemetry Word) a nese informaci o začátku podrámce. Druhé slovo se označuje jako předávací slovo (HOW – Handover Word) a obsahuje pořadí podrámce v aktuálním GPS týdnu a pořadové číslo podrámce v aktuálním rámci. Zbývající slova využívají pouze 24 informačních bitů. Posledních 6 bitů je využito jako paritních k zabezpečení přenosu pomocí Hammingova kódu se vzdáleností 4. Tento mechanizmus umožňuje detekovat tři chybné bity ve slově a nebo jeden bit opravit.