8.1 Služby založené na lokalizaci
Znalost zeměpisné polohy umožňuje uživatelům využít nové služby v oblastech mimořádných událostí, zdravotnictví, zábavy nebo práce. Zeměpisná poloha uživatelů je reprezentována jejich souřadnicemi v prostoru.
LBS (Location Based Services) jsou služby využívající zeměpisné informace pro uživatele.
Příklad služeb vycházejících z polohy je navigační služba, sledování lidí nebo strojů (např. Latitude), geocaching, nebo turistický průvodce. Další důležitou aplikací LBS je určení polohy v případě nebezpečí (například poloha dopravní nehody, zraněné osoby, atd.). V tomto případě je poloha osoby zjištěna automaticky a vyžadovaná pomoc je navigována na místo bez potřeby zásahu uživatele.
Koncept LBS vyžaduje architekturu složenou z pěti typů zařízení:
-
Uživatelské zařízení – zajišťuje rozhraní mezi uživatelem a systémem LBS. Uživatelské zařízení je obvykle mobilní jako např. mobilní telefon, notebook, tablet, navigační zařízení, atd.
-
Komunikační síť – je zodpovědná za poskytování uživatelských dat a žádostí od uživatelského zařízení k poskytovateli služeb a zpětné poskytování získaných informací ze systému zpět k uživateli.
-
Lokalizační komponenta - určuje zeměpisnou polohu uživatele.
-
LBS poskytovatel – nabízí služby uživatelům a je zodpovědný za zpracování žádostí uživatelů.
-
Poskytovatel obsahu – zásobuje LBS poskytovateleobsahem, který není uložen v LBS poskytovatele; může to být například zdroj map, pozice objektů, informace vztahující se k objektům, informace o veřejné dopravě, atd.
Pro efektivní a přínosné využívání služeb LBS, je rozhodující stanovení polohy pomocí Lokalizační komponenty. Bez přesné polohy by byly možnosti a schopnosti sytému LBS podstatně omezeny. Poloha může být určena mnoha způsoby. Nejčastější cestou je využití satelitních navigačních systémů nebo mobilní sítě. Obě hlavní metody jsou popsány v další části.
8.2 Satelitní navigační systémy

Možnost použití satelitu pro určení polohy byla objevena týmem vedeným Dr. Richard B. Kershnerem během monitorování radiového přenosu prvního satelitu – Sputniku. Tým zjistil, že frekvence vysílání se kvůli Dopplerovu efektu mění při pohybu satelitu. V závislosti na těchto frekvenčních změnách, byli schopni určit pozici satelitu. Obrácením tohoto postupu, kdy je poloha satelitů známa, získáme polohu uživatele nebo sledovaného objektu.
Satelitní systémy pro určování polohy jsou založeny na měření času šíření signálu vysílaného satelity. Doba šíření signálu‚ t, je přepočtena na vzdálenost‚ s, mezi satelitem a uživatelem podle vzorce s=c*t, kde c je rychlost světla ve vakuu (3·108 m/s). Pozice je určena ze znalosti pozice satelitu a doby šíření signálu jako koule složená z bodů umístěných ve stejné vzdálenosti od satelitu. To znamená, že každý satelit umožňuje určit množství potenciálních poloh uživatele. Přesná pozice objektu je definována pomocí čtyř parametrů: zeměpisná šířka, zeměpisná délka, nadmořská výška a čas. Pro odvození všech čtyř parametrů, musíme být schopni definovat čtyři koule. Pak polohu uživatele představuje průsečík těchto čtyř koulí. V ideálním případě s nulovou chybou při určení vzdálenosti mezi satelity a uživatelem se všechny koule protnou v jednom bodě. Jestliže vzdálenost není určena přesně, protnutí čtyř koulí určuje oblast potenciální polohy uživatele. Velikost této oblasti je úměrná chybám při měření vzdálenosti a může být redukována s využitím informací z dalších satelitů.
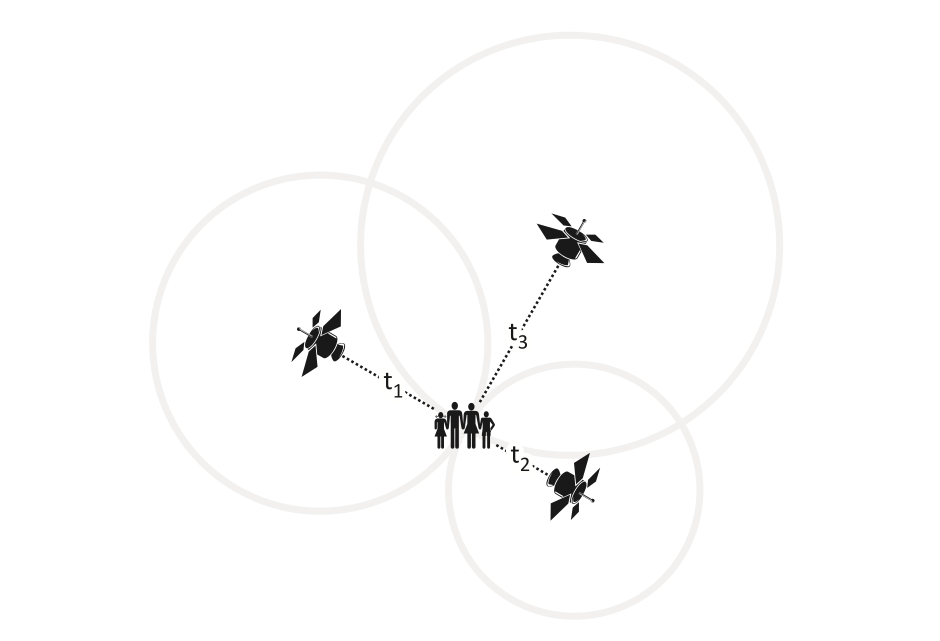
Princip určování polohy uživatelů
Tento obecný princip určování polohy využívá většina běžných navigačních systémů jako je americký systém GPS, evropský systém Galileo, ruský systém Glonass, nebo čínský COMPASS.
GPS
GPS je celosvětový satelitní navigační systém vyvinutý Ministerstvem obrany Spojených států amerických pro vojenské účely. Projekt GPS byl započat v roce 1973 a první testovací satelit byl vyslán v roce 1978. Nyní GPS poskytuje služby určení polohy, navigace a určení času nejen pro vojenské účely, ale také pro civilní využití po celém světě. Systém GPS se skládá ze tří částí: vesmírný segment, kontrolní segment a uživatelský segment.
-
Vesmírný segment: Tento segment se skládá minimálně z24 satelitů, obíhajících přibližně 20 200 km nad Zemí, s periodou oběžné doby 11 hodin a 58 minut. Satelity jsou rozmístěny v šesti oběžných drahách s nakloněním 55°. Minimální počet satelitů je odvozen z podmínky zajištění viditelnosti alespoň čtyř satelitů z každého bodu na Zemi. Další přidané satelity mohou zvýšit přesnost systému. V roce 2011 byla dřívější konstelace satelitů upravena pro zlepšení pokrytí a do základní konstelace 24 satelitů byly přidány další tři satelity. To znamená, že nyní je za základní konstelaci považováno 27 satelitů. V posledních letech obíhá Zemi zpravidla 31 aktivních satelitů a tři nebo čtyři náhradní satelity. Všechny satelity přenáší signály s informací vyžadovanou pro odvození polohy uživatele.
-
Kontrolní segment: Kontrolní část je tvořena pozemními zařízeními pro monitorování, kontrolu a řízení satelitů. Centrem kontrolního segmentu je hlavní řídící stanice v Coloradu ve Spojených státech. Hlavní kontrolní stanice je zodpovědná za řízení všech kontrolních procesů. Aby se zabránilo vypnutí v případě výpadku hlavní kontrolní stanice, je v Kalifornii umístěna záložní stanice. Hlavní kontrolní stanice přijímá a analyzuje informace ze satelitů (např. informace o stavu satelitů, vysílané navigační informace, a podobně) a navigační informace z 16 pozemních monitorovacích stanic. Monitorovací stanice sledují přenos navigačních informací ze satelitů a sledují polohu satelitů. Na základě nasbíraných informací posílá hlavní kontrolní stanice příkazy satelitům pro zajištění správných a spolehlivých služeb (např. příkaz pro změnu polohy satelitu). Příkazy, informace pro satelity nebo ostatní data jsou posílány skrz pozemní antény. V kontrolním systému je rozmístěno 12 pozemních antén po celém světě.
-
Uživatelská část: Uživatelská část je reprezentována přijímači GPS, které zpracovávají informace přijaté ze satelitů. Přijímač GPS obsahuje čip GPS s radiovou částí, signálový procesor, paměť, kontrolní a řídící část a rozhraní pro hostitelské zařízení. Čip GPS poskytuje zpracované navigační informace hostitelskému zařízení pomocí protokolu NMEA (National Marine Electronics Association).
Satelity přenáší tři typy signálu. První signál, P (přesný kód neboli precision code), je šifrovaný kód s pseudonáhodnou posloupností o frekvenci 10,23 MHz. Tento kód můžeme nahradit druhým kódem, Y kódem, v případě potřeby tzv. anti-spoofing režimu. Poslední kód je kód C/A (coarse/acquisition kód), který je využíván pro civilní účely nebo získávání P (Y) kódů. C/A je složen z pseudonáhodné posloupnosti vysílanou na frekvenci 1,023 MHz. Navigační zpráva, tj. zpráva s informací pro určení uživatelské pozice, je přenášena rychlostí 50 bit/s, a je přidána do C/A a P (Y) kódu. Obě výsledné sekvence jsou modulovány na nosnou L1 na frekvenci 1575,45 MHz. Další sekvence vzniklá součtem navigačních zpráv a P (Y) kódu je modulována na nosné L1 a L2 na frekvenci 1227,6 MHz. Oba výstupy L1 a L2 jsou poté vyslány k uživatelskému přijímači GPS. Kromě toho, další signály L2C (1227 MHz), L5 (1176 MHz) a L1C (1575 MHz) mohou být přenášeny pro minimalizování chyby určení pozice pro komerční účely, služby spojené se záchranou životů (safety-of-life), a pro interoperabilitu s ostatními systémy. Jelikož všechny satelity vysílají na stejných nosných, tak je využita přístupová technika CDMA pro příjem signálu z více satelitů.
Kompletní navigační zprávy jsou přenášeny v rámcích s délkou 1500 bitů. Každý rámec je složen z pěti podrámců obsahujících různé informace jako je pozice satelitu, stav satelitu, korekce času, vliv zpoždění ionosféry, nebo informace o oběžných dráhách satelitů. K přenosu celé navigační zprávy je potřeba 30 sekund (1500 bitů přenášeno s rychlostí 50 bit/s).
Jelikož je čas potřebný k doručení kompletní informace o všech satelitech (tj. čas mezi zapnutím zařízení a určením polohy uživatele) velmi dlouhý, tak mohou satelitní navigační systémy využít mobilní komunikační sítě pro doručení některých informací přes mobilní sítě místo obvyklého doručení přímo přes satelity. Tento způsob je znám jako asistovaná GPS (Assisted GPS). Takto je výrazně zrychlen proces inicializace GPS.
Přesnost určení polohy je ovlivněna několika faktory: měření času doručení signálu, atmosférické vlivy (zvláště vlivy ionosféry), vícecestné šíření, aktuálnost polohy satelitu, synchronizace hodin a počet viditelných satelitů. Nejvýznamnější chybu způsobuje ionosféra; nicméně, její efekt můžeme minimalizovat využitím několika signálů přenášených na různých nosných (např. L1 a L2), jelikož vliv ionosféry je rozdílný pro různé frekvence. Celková chyba určení polohy pomocí GPS je v řádech metrů (typicky do 8 metrů). Přesnost můžeme dále zlepšit použitím diferenční GPS (diferential GPS), která využívá síť pozemních stanic přesně definovanou pozicí pro zpřesnění polohy získané z informací ze satelitů.

Signály vysílané GPS satelitem
Galileo
Evropská alternativa k systému GPS je navigační systém Galileo. Ve vesmírné části se Galileo skládá z 27 operujících satelitů a 3 náhradních satelitů. Satelity jsou umístěny ve třech orbitálních rovinách se vzájemným náklonem 56°. Výška satelitů je 23 222 km nad zemí s oběžnou dobou 14 hodin. Kontrolní segment Galilea zahrnuje dvě řídící centra, v Oberpfaffenhofenu v Německu a ve Fucinu v Itálii. Další dvě centra LEOP (Lunch and Early Operations) jsou v Toulouse ve Francii a v Darmstadtu v Německu. Analogicky k GPS bude po celém světě rozmístěno také 5 telemetrických, sledovacích a kontrolní stanice, 40 senzorových stanic, a 10 vysílacích stanic pro monitorování a řízení satelitů.
Satelity, stejně jako u GPS, přenáší několik navigačních signálů (E1, E5a, E5b, E6). První signál E1, přenáší data a navigační zprávu kódované nešifrovaně s frekvencí 1,023 MHz na nosné frekvenci 1575,42 MHz. Signál s rychlostí 125 bit/s je dostupný pro civilní využití (známý jako Otevřené služby – open services), komerční služby a služby pro záchranu života. Druhý a třetí signál E5 a E5b jsou analogické k E1. Avšak E5a E5b jsou modulovány na frekvenci 1176,450 MHz a 1207,140 MHz. Oba jsou kódovány sekvencí s frekvencí 10,23 MHz. Signál E5 přenáší data pro navigaci a časování. V porovnání s E1 a E5b, využívá E5a robustnější modulace a proto umožňuje přenos rychlostí pouze 25 bit/s a je dostupný pouze pro otevřené služby. Poslední signál E6 je navrhnut pro komerční účely a proto je zakódovaný. Tento signál je modulován na nosnou frekvenci 1278,750 MHz s využitím sekvenčního kódu s frekvencí 5,115 MHz. Podporovaná přenosová rychlost je 500 bit/s.
Ostatní navigační systémy
Princip stanovení polohy uživatele je analogický také u ostatních navigačních systémů jako jsou:
-
GLONASS (GLObalnaja NAvigacionnaja Sputnikovaja Sistema) – Předpokládá 26 satelitů rozmístěných na tři oběžné dráhy. Zajímavým faktem je ten, že systém není kompatibilní s GPS nebo Galileo, protože používá frekvenční multiplex FDM, tj. každý satelit vysílá na jiné frekvenci. Od roku 2011 však i Glonass podporuje také princip CDMA, aby umožnil kompatibilitu s GPS a Galileem. Pozemní segment pro GLONAS je umístěn v Rusku.
-
COMPASS, také známý jako BeiDou 2, je čínský navigační systém. V současné době je vyvinut pro národní účely, ale v příštích letech se předpokládá jeho rozšíření i pro účely celosvětové navigace (s 35 satelity).
-
IRNSS (Indian Regional Navigational Satellite System) se skládá ze 7 satelitů ve vesmírném segmentu. Z toho jsou 3 satelity na geostacionární oběžné dráze (přibližně 35 800 km) a 4 satelity jsou na geosynchronní dráze k pokrytí Indického subkontinentu.
8.3 Určování polohy pomocí mobilní sítě
Mobilní sítě umožňují odhadnout polohu uživatele v závislosti na znalosti pozic základnových stanic. Existuje několik možností využití mobilní komunikační sítě k lokalizaci. Přístupy se liší v parametrech užívaných k určení polohy.
První způsob je znám jako Cell Of Origin (COO). Využívá identifikaci základní stanice (Cell ID) k určení polohy uživatele. Pozice uživatele odpovídá souřadnicím jeho základnové stanice. Chyba určení polohy se v tomto případě rovná poloměru buněk.
Vyšší přesnost je dosažena pomocí metody Time of Arrival (TOA), která využívá nejen Cell ID, ale také schopnost změřit zpoždění mezi odesláním signálu mobilní stanicí a jeho příjem základnovou stanicí. Vzhledem k tomu, že se signál šíří rychlostí světla, vzdálenost uživatele od základnové stanice je vypočítána stejným způsobem jako u satelitních systémů.
Když je signál přijímán více než jednou základnovou stanicí, TOA může být rozšířena na Time Difference of Arrival (TDOA). V tomto případě je poloha uživatele vypočítána za pomoci doby šíření signálu, jako průnik odhadovaných vzdáleností od sousedních základnových stanic. V TDOA je čas příjmu signálu zpracováván sítí. Jestliže jsou data zpracována mobilní stanicí, je algoritmus označován jako Enhanced Observed Time Difference (E-OTD). E-OTD vyžaduje implementaci speciálního vybavení, tzv. lokalizační měřící jednotka - Location Measurement Unit (LMU). LMU zajišťuje přesné časování a přesnost lokalizačních dat.
Jestliže jsou využity směrové antény, buďto v základnové stanici nebo v mobilní stanici, směr ze kterého je signál přijímán může být triangulován, podobným způsobem jako v TDOA. Tato metoda je pak nazývána jako Angle of Arrival (AOA).